Questi sono appunti personali e possono contenere errori o imprecisioni. Non sostituiscono libri di testo o fonti ufficiali. Il materiale è soggetto a revisione continua grazie al contributo volontario della comunità. Contribuisci su GitHub
3.7 Circuiti ad Aggancio di Fase (PLL) 🎯
Benvenuti nel mondo affascinante dei PLL! Immaginate un PLL come un "pilota automatico" che mantiene un'onda perfettamente sincronizzata con un riferimento, anche se ci sono disturbi o variazioni. Scopriamo come questi circuiti intelligenti permettono ai ricevitori moderni di sintonizzare con precisione millimetrica e ai sintetizzatori di generare migliaia di frequenze stabili!
🎯 Cos'è un PLL (Phase-Locked Loop)?
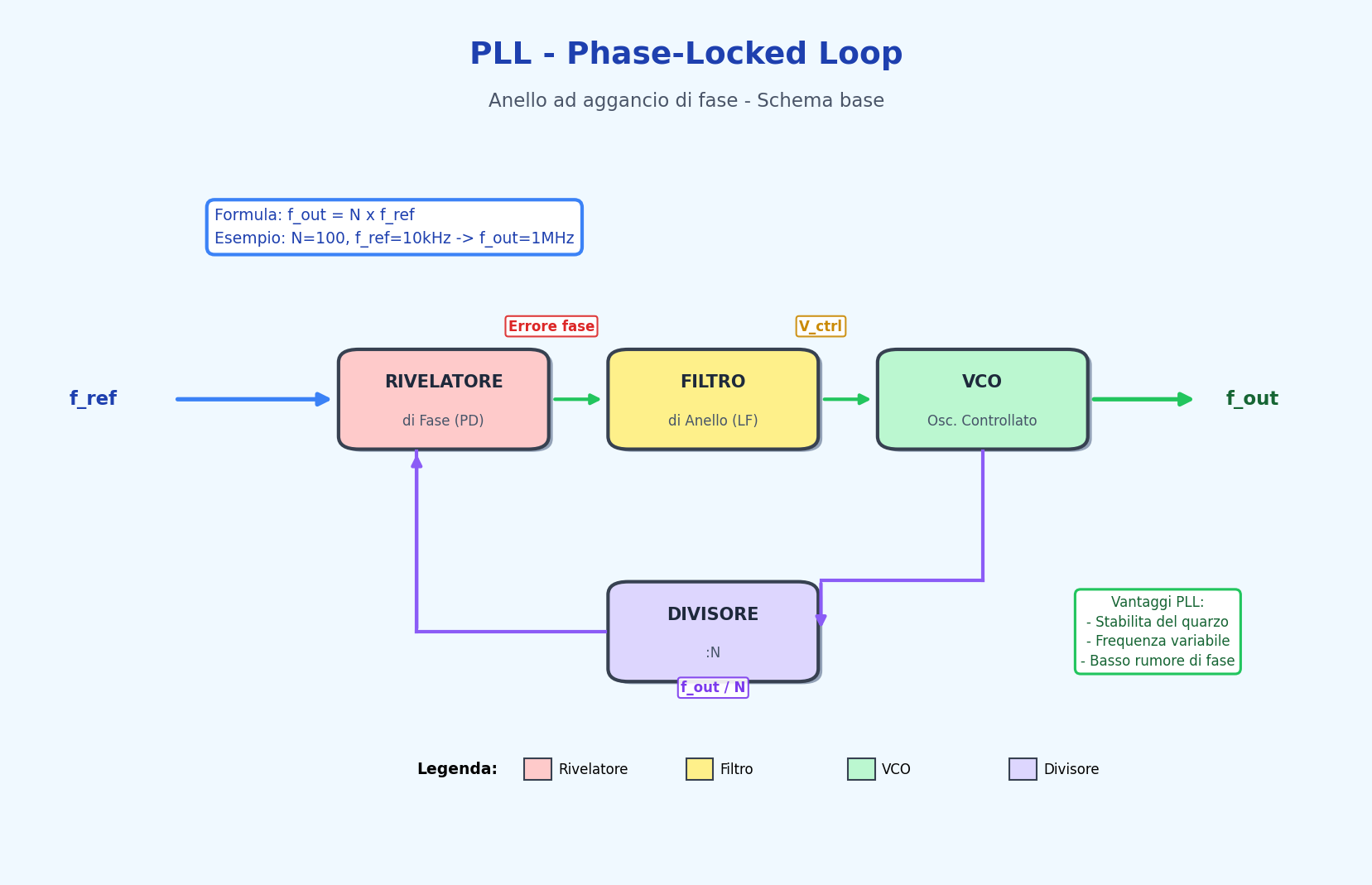
Un PLL è un sistema di controllo a retroazione che sincronizza la fase e la frequenza di un oscillatore controllato (VCO) con un segnale di riferimento.
- Funzione principale: Sincronizzazione e moltiplicazione di frequenza
- Input: Segnale di riferimento stabile
- Output: Segnale sincronizzato e/o moltiplicato
- Componente chiave: Phase detector, loop filter, VCO, frequency divider
Diagramma di un PLL
PLL Base
⚙️ Componenti Principali del PLL
1. Phase Detector (Rivelatore di Fase)
Confronta la fase tra segnale di riferimento e segnale di feedback.
Tipi comuni:
- Moltiplicatore analogico: Mescola i due segnali
- Digital (XOR): Confronta digitale delle fasi
- Frequency/Phase detector: Per segnali digitali
Uscita: Tensione proporzionale all'errore di fase
2. Loop Filter (Filtro di Anello)
Filtra la tensione di errore di fase e stabilizza il sistema.
Caratteristiche:
- Tipo: Passa-basso (tipicamente 1° o 2° ordine)
- Funzione: Rimuove rumore, stabilizza il loop
- Parametri: Frequenza di taglio, smorzamento
3. VCO (Voltage Controlled Oscillator)
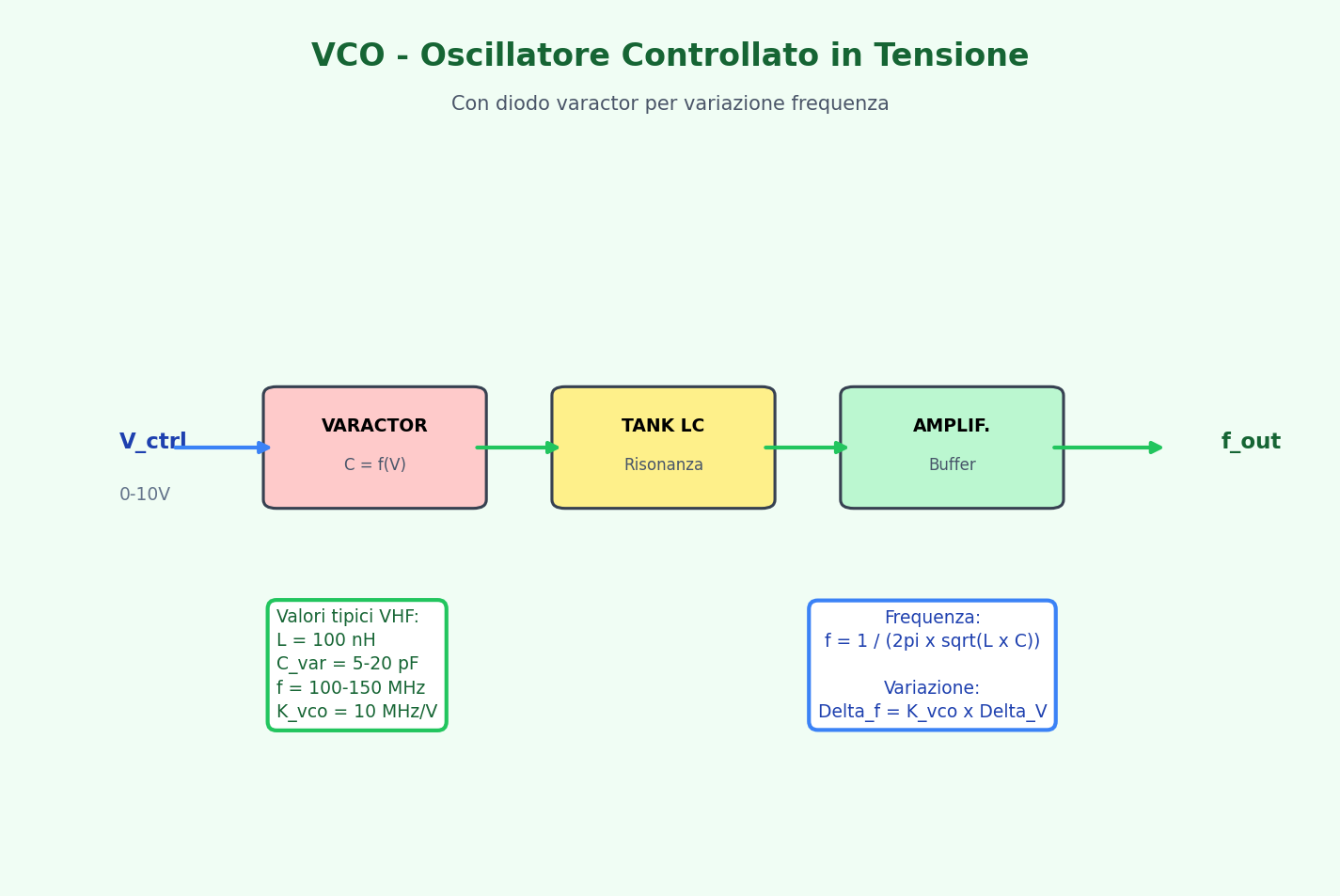
Oscillatore controllato in tensione che genera la frequenza di uscita.
Relazione: f_out = f_0 + K_v × V_control
Dove:
- f_0: Frequenza centrale (senza controllo)
- K_v: Sensibilità (Hz/V)
- V_control: Tensione di controllo
VCO per PLL
4. Frequency Divider (Divisore di Frequenza)
Divide la frequenza di uscita per il confronto con il riferimento.
Relazione: f_feedback = f_out / N
Dove N è il rapporto di divisione (intero)
🔄 Funzionamento del PLL
1. Fase di Lock (Blocco)
Il PLL è sincronizzato e l'errore di fase è costante.
Condizioni:
- f_out = N × f_ref
- Δφ = costante
- Uscita del VCO stabile
2. Fase di Acquisizione (Acquisition)
Il PLL sta cercando di sincronizzarsi con il riferimento.
Processo:
- Il VCO varia la frequenza
- Quando si avvicina al riferimento, il loop si blocca
- Tempo di acquisizione dipende dal loop filter
3. Fase di Hold (Mantenimento)
Il PLL mantiene la sincronizzazione anche se il riferimento viene temporaneamente perso.
Durata: Dipende dal condensatore nel loop filter
📊 Parametri Caratteristici del PLL
Range di Lock (Gamma di Blocco)
Range di frequenze in cui il PLL può sincronizzarsi.
Formula: Δf_lock = ±f_ref × (K_v × K_pd × K_osc / N)
Bandwidth (Larghezza di Banda)
Velocità con cui il PLL risponde a variazioni.
Tipici:
- Largo: 10kHz - 1MHz (risposta rapida)
- Stretto: 1Hz - 10kHz (risposta lenta, stabilità alta)
Phase Margin
Margine di stabilità del sistema.
Valori tipici: 30° - 60°
Lock Time
Tempo necessario per acquisire il blocco.
Formula: t_lock ≈ 1/(2π × BW)
🎛️ Tipi di PLL
1. PLL Analogico
Usa componenti analogici per tutto il loop.
Vantaggi:
- Basso rumore di fase
- Buona linearità
- Risposta rapida
Svantaggi:
- Costo elevato
- Dimensioni maggiori
- Limiti di frequenza
2. PLL Digitale (DPLL)
Usa circuiti digitali per phase detection e divisione.
Vantaggi:
- Costo ridotto
- Dimensioni compatte
- Frequenze più alte
- Programmabilità
Svantaggi:
- Rumore di quantizzazione
- Limiti di risoluzione
- Jitter maggiore
3. Mixed-Mode PLL
Combina sezioni analogiche e digitali.
Vantaggi:
- Buon compromesso prestazioni/costo
- Flessibilità di progettazione
- Ottimo per molte applicazioni
4. Fractional-N PLL
Usa divisori di frequenza non interi.
Vantaggi:
- Risoluzione di frequenza elevata
- Canali stretti con riferimento basso
- Sintesi diretta
Svantaggi:
- Spurie frazionarie
- Complessità maggiore
📱 Applicazioni dei PLL
1. Sintetizzatori di Frequenza
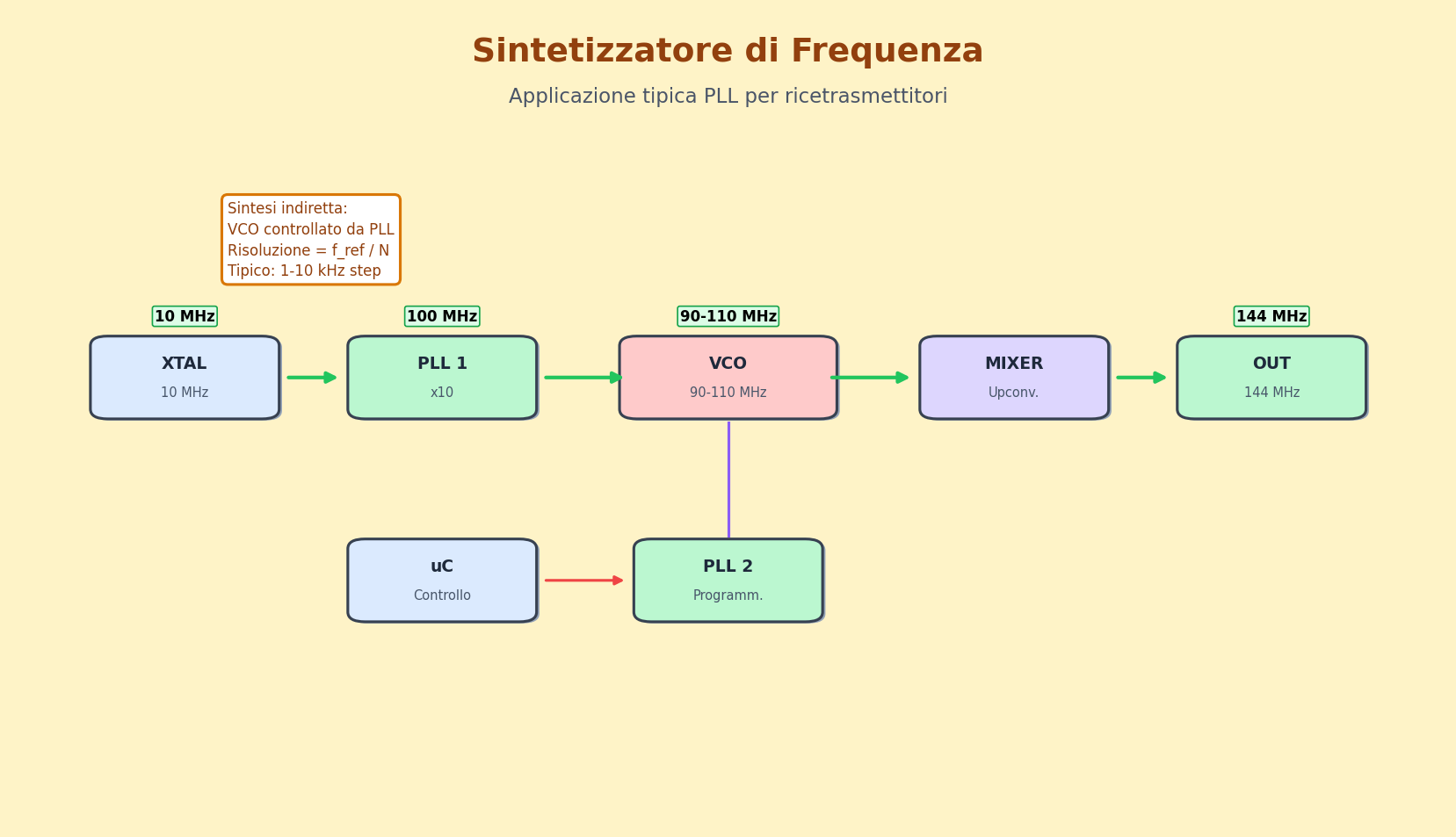
Generano molteplici frequenze da un singolo riferimento.
Architettura tipica:
- Riferimento: quarzo ad alta stabilità
- PLL principale: genera frequenza base
- PLL secondari: generano canali RF
Sintetizzatore con PLL
2. Ricevitori Radio
Sintonizzazione precisa e stabile delle frequenze.
Vantaggi:
- Sintonizzazione digitale (senza meccanici)
- Stabilità termica superiore
- Memoria delle frequenze
3. Clock Generation
Generano clock per sistemi digitali e computer.
Requisiti:
- Basso jitter
- Bassa deriva
- Multipli fasi
4. Recupero di Clock
Estraggono clock da segnali dati seriali.
Uso: Comunicazioni seriali, reti, storage
🔧 Architetture Avanzate
Dual-Modulus Prescaler
Permette divisione frazionaria con spurie ridotte.
Principio: Divisione alternata tra N e N+1
Delta-Sigma PLL
Usa modulazione delta-sigma per alta risoluzione.
Vantaggi:
- Risoluzione molto alta
- Rumore di fase basso
- Spurie minime
All-Digital PLL (ADPLL)
Completamente digitale, adatto per integrazione VLSI.
Componenti:
- Time-to-digital converter (TDC)
- Digital loop filter
- Digitally controlled oscillator (DCO)
📊 Tabella Comparativa PLL
| Tipo | Frequenza Max | Jitter | Costo | Applicazione |
|---|---|---|---|---|
| Analogico | 1-5GHz | Basso | Alto | RF professionale |
| Digitale | 10-100GHz | Medio | Basso | Integrati, mobile |
| Mixed-Mode | 1-10GHz | Basso-Medio | Medio | Generale |
| Fractional-N | 1-10GHz | Medio | Medio | Sintetizzatori |
| ADPLL | 1-20GHz | Basso | Basso | VLSI, SoC |
🛡️ Problemi Comuni e Soluzioni
1. Spurie Frazionarie
Frequenze indesiderate generate da divisioni non intere.
Soluzioni:
- Dual-modulus prescaler
- Delta-sigma modulation
- Filtri digitali
2. Jitter
Variazioni temporali del periodo dell'onda.
Cause:
- Rumore termico
- Rumore di fase
- Rumore di alimentazione
Soluzioni:
- Loop filter ottimizzato
- Alimentazione pulita
- VCO a basso rumore
3. Reference Spurs
Rumore del segnale di riferimento che appare nell'uscita.
Soluzioni:
- Reference pulito
- Shielding adeguato
- Filtraggio del riferimento
4. Cycle Slip
Perdita di cicli di clock in sistemi digitali.
Soluzioni:
- Clock data recovery (CDR)
- PLL con cycle slip detection
- Sincronizzazione esterna
🧪 Progettazione di un PLL
1. Specifiche del Progetto
- Frequenza di uscita: Range e risoluzione
- Stabilità richiesta: Deriva e jitter massimi
- Tempo di lock: Velocità di risposta richiesta
- Costo e dimensioni: Vincoli del progetto
2. Scelta dei Componenti
- Phase detector: Tipo e linearità
- VCO: Frequenza, sensibilità, rumore
- Loop filter: Tipo, frequenza di taglio
- Divisori: Massima frequenza, jitter
3. Simulazione e Test
- Simulazione SPICE: Verifica stabilità
- Analisi di fase: Margini di stabilità
- Test di jitter: Misurazione delle prestazioni
- Test di lock: Verifica del range di blocco
🧠 Quiz di Ripasso
Testa le tue conoscenze sui PLL!
Domanda 1: Un PLL con N=100 e f_ref=10MHz genera quale frequenza?
- A) 100MHz
- B) 1GHz
- C) 10GHz
Risposta
B) 1GHz
f_out = N × f_ref = 100 × 10MHz = 1GHz
Domanda 2: Quale componente confronta la fase nel PLL?
- A) VCO
- B) Loop filter
- C) Phase detector
Risposta
C) Phase detector
Il phase detector genera un'uscita proporzionale all'errore di fase.
Domanda 3: Un PLL con bandwidth più larga ha...
- A) Risposta più rapida
- B) Maggiore stabilità
- C) Meno jitter
Risposta
A) Risposta più rapida
Bandwidth più larga = risposta più veloce ma stabilità ridotta.
Domanda 4: Quale tipo di PLL ha il costo più basso?
- A) Analogico
- B) Digitale
- C) Mixed-mode
Risposta
B) Digitale
I PLL digitali sono più economici e compatti.
Domanda 5: Il lock time è inversamente proporzionale a...
- A) Frequenza di riferimento
- B) Bandwidth del loop
- C) Guadagno del VCO
Risposta
B) Bandwidth del loop
t_lock ≈ 1/(2π × BW), quindi BW più grande = lock time più piccolo.
Conclusione
I PLL sono i piloti automatici dell'elettronica moderna! Dalla semplice sincronizzazione di frequenze alla complessa sintesi di migliaia di canali, questi circuiti intelligenti sono essenziali per ogni sistema RF digitale. Capire i principi di blocco, acquisizione e mantenimento è fondamentale per ogni radioamatore moderno. Scegli l'architettura giusta basandoti su frequenza, stabilità e costi! 🎯